


Cet article examine une amélioration de la topologie buck traditionnelle dans la distribution de 48 V dans les centres de données et les applications de communication.
Cet article est publié par pÉlectrique dans le cadre d’un partenariat exclusif de contenu numérique avec les Systèmes de Puissance de Bodo.
La distribution à quarante-huit volts est populaire dans les centres de données et les applications de communication, avec de nombreuses solutions pour la conversion de 48 V à la tension intermédiaire. L’approche la plus simple est une topologie buck, qui peut offrir de hautes performances mais souffre souvent d’une densité de puissance insuffisante. La mise à niveau de la buck multiphase avec des inducteurs couplés permet une amélioration spectaculaire de la densité de puissance qui rivalise avec les alternatives de pointe tout en conservant un avantage de performances massif.
Les inducteurs couplés multiphasiques présentent un couplage inverse entre les enroulements, permettant l’annulation des ondulations de courant dans chaque courant de phase. Ce bénéfice peut être échangé soit contre l’efficacité, soit, par exemple, contre une réduction de taille et une amélioration de la densité de puissance.
La voie de distribution de 48 V est généralement convertie à une tension intermédiaire, souvent 12 V ou moins. Ensuite, les différents régulateurs locaux de point de charge fournissent différentes tensions directement à différentes charges. L’un des premiers choix à considérer pour le régulateur de tension de réduction de 48 V à 12 V est un convertisseur buck multiphase (Figure 1). Cette solution a une sortie régulée VO et des transitoires rapides, ce qui est simple et peu coûteux. Pour une plage de puissance de quelques centaines de watts à plus de 1 kW, quatre phases parallèles peuvent être envisagées. Cependant, comme une haute efficacité est souvent une priorité, la fréquence de commutation est souvent relativement basse pour les convertisseurs de 48 V afin de réduire les pertes de commutation, par rapport aux applications à tension plus faible avec des entrées de 12 V ou même 5 V. Cela nuit deux fois aux éléments magnétiques en termes de volts × secondes, car la tension déjà notable est aussi appliquée pendant un temps relativement plus long. En conséquence, les composants magnétiques pour 48 V sont généralement encombrants, avec des enroulements multiprises pour supporter l’augmentation significative des volts × secondes comparés aux applications à tension plus faible. Une haute efficacité peut néanmoins être atteinte dans un convertisseur buck de 48 V, mais généralement avec une taille globale significative, où les inducteurs occupent la majeure partie du volume.
Le convertisseur buck classique de 48 V à 12 V d’environ 1 kW a quatre phases avec des inducteurs discrets de 6,8 μH et fonctionne à 200 kHz. Ces quatre inducteurs sont les plus gros et les plus grands composants, représentant la majeure partie du volume de la solution.
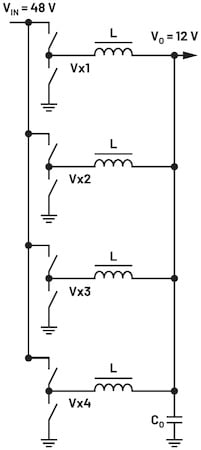
Figure 1. Convertisseur buck à quatre phases avec inducteurs discrets. Image utilisée avec la permission de Bodo’s Power Systems []
Ondulation du courant
L’ondulation de courant dans chaque phase du buck conventionnel peut être trouvée dans l’Équation 1, où le rapport cyclique est D = VO/VIN, VO est la tension de sortie, VIN est la tension d’entrée, L est la valeur d’inductance, et Fs est la fréquence de commutation.
\[dIL_{DL}=\frac{V_{IN}-V_{O}}{L}\times\frac{D}{F_{S}}\,\,\,(1)\]
En remplaçant les inducteurs discrets (DL) par l’inducteur couplé1–7 qui a une inductance de fuite Lk et l’inductance mutuelle Lm, l’ondulation de courant dans CL (inducteur couplé) peut être exprimée par l’Équation 2.6 Le FOM est exprimé comme l’Équation 3, où Nph est le nombre de phases couplées, ρ est un coefficient de couplage (Équation 4), et j est un index courant, qui définit simplement un intervalle applicable du rapport cyclique (Équation 5).
\[dIL_{DL}=\frac{V_{IN}-V_{O}}{L}\times\frac{D}{F_{S}}\times\frac{1}{FOM(D,N_{ph,\rho,k})}\,\,\,(2)\]
\[FOM=\frac{\Big(1+\frac{\rho}{\rho+1}\times\frac{1}{N_{ph}-1}\Big)}{1\Biggr[(N_{ph}-2\times j-2)+\frac{j\times(j+1)}{N_{ph}\times D}-\frac{N_{ph}\times D\times(N_{ph}-2\times j-1)+j\times(j+1)}{N_{ph}\times(1-D)}\Biggr]\times\frac{\frac{\rho}{\rho+1}}{N_{ph}-1}}\,\,\,(3)\]
\[\rho=\frac{L_{m}}{L_{k}}\,\,\,(4)\]
\[j=floor(D\times Nph)\,\,\,(5)\]
Considérations sur les inducteurs couplés
La première étape pour l’amélioration serait de tracer un FOM pour Nph = 4 pour plusieurs valeurs pratiquement raisonnables du coefficient de couplage Lm/Lk (Figure 2). La courbe rouge Lm/Lk = 0 représente la référence FOM = 1 pour l’inducteur discret. Il a été démontré que les structures NCL (notch CL) avec très faible fuite peuvent généralement atteindre de très hauts Lm/Lk et, par conséquent, de fortes valeurs de FOM.8,9 Cependant, bien que le rapport cyclique d’intérêt soit idéalement situé dans le premier notch D = 12 V/48 V=0.25, il est nécessaire de prendre en compte une certaine plage pour VIN et VO. Parfois, le VIN nominal peut être de 48 V ou 54 V plus une certaine tolérance, VO peut être ajusté loin de 12 V, etc. Pour que l’ondulation de courant reste contenue si le rapport cyclique change autour de D = 0,25 dans une certaine plage, un design typique de CL avec fuite significative est choisi plutôt qu’un NCL, tout en ayant toujours une valeur FOM significative. En supposant Lm/Lk > 4, un bénéfice d’environ 6× pourrait être envisagé à partir du FOM dans la Figure 2 pour diminuer la valeur d’inductance dans CL, par rapport à la référence DL. La réduction du stockage d’énergie devrait directement affecter le volume requis des composants magnétiques. Réduire la valeur DL = 6,8 μH à CL = 1,1 μH devrait, par conséquent, être bénéfique pour la réduction de taille.
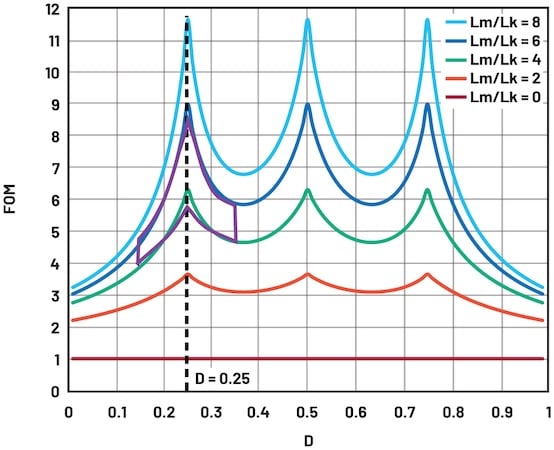
Figure 2. FOM pour un CL à 4 phases pour différentes valeurs de Lm/Lk en fonction du rapport cyclique D. La zone d’intérêt est surlignée. Image utilisée avec la permission de Bodo’s Power Systems []
L’ondulation de courant correspondante est tracée dans la Figure 3, comparant le design de base DL = 6.8 μH avec le CL proposé à 4 × 1.1 μH (Lm = 4.9 μH) dans des conditions de VIN = 48 V et Fs = 200 kHz. Dans la zone d’intérêt, l’ondulation de courant de CL est similaire ou inférieure à celle de DL. Cela implique que les valeurs efficaces de toutes les formes d’onde du circuit sont similaires, tout comme les pertes de conduction. La même ondulation à la même fréquence Fs implique également les mêmes pertes de commutation, pertes de pilotage de porte, etc., ce qui signifie que l’efficacité entre les deux solutions devrait être très similaire (en supposant une contribution similaire des pertes des inducteurs DL et CL, étant la seule différence).
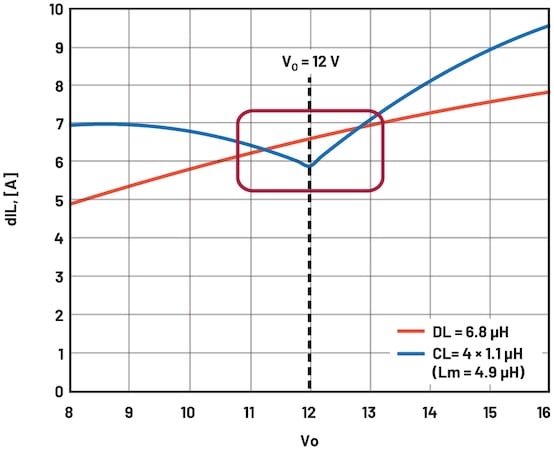
Figure 3. Ondulation de courant pour DL = 6.8 μH et CL = 4 × 1.1 μH pour VIN = 48 V et Fs = 200 kHz en fonction de VO. La zone d’intérêt est surlignée. Image utilisée avec la permission de Bodo’s Power Systems []
Le CL conçu = 4 × 1.1 μH est montré dans la Figure 4, remplaçant quatre inducteurs DL = 6.8 μH. Chaque DL mesure 28 mm × 28 mm × 16 mm, en supposant qu’ils sont espacés de 0,5 mm : le CL à 4 phases avec des dimensions de 56,5 mm × 18 mm × 12,6 mm réalise une réduction de volume de 4× pour les composants magnétiques.
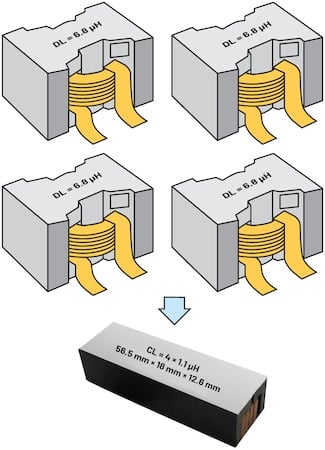
Figure 4. Quatre inducteurs DL = 6.8 μH (en haut) sont remplacés par CL = 4 × 1.1 μH (en bas), réalisant une réduction de volume de 4×. Image utilisée avec la permission de Bodo’s Power Systems []
Une solution complète régulée de 1,2 kW de 48 V à 12 V est présentée dans la Figure 5. Les dimensions et l’empreinte du CL sont conçues pour accueillir deux pièces de CL à l’intérieur d’une taille standard de quart de brique. Le placement de tous les composants d’environ 1 mm (FET, ICs de contrôle, condensateurs en céramique, etc.) sur le côté inférieur du PCB permet d’obtenir une taille de 1/8 de brique pour la solution de 1,2 kW.

Figure 5. Première étape régulée de 48 V à 12 V. Les composants sont placés sur le dessus du PCB à l’intérieur du contour de 1/4 de brique. Déplacement de tous les composants d’environ 1 mm sur le dessous : 1/8 de brique. Image utilisée avec la permission de Bodo’s Power Systems []
Gain de performance
Lorsque les inducteurs DL = 6.8 μH ont été remplacés par CL = 4 × 1.1 μH, la limite de la vitesse de montée du courant dans l’inducteur a également été améliorée de 6×, ce qui est toujours bénéfique pour l’amélioration transitoire. De plus, la cote de saturation de l’inducteur a été améliorée d’environ 2× à 100°C, même si le volume total des composants magnétiques a diminué de 4×.
Les performances transitoires de la solution proposée avec VIN = 48 V et VO = 12 V sont illustrées dans la Figure 6. Comme prévu, le retour d’information régule la tension de sortie à une valeur prédéfinie pour le courant de charge changeant, compensant ainsi toute variation de la tension d’entrée.
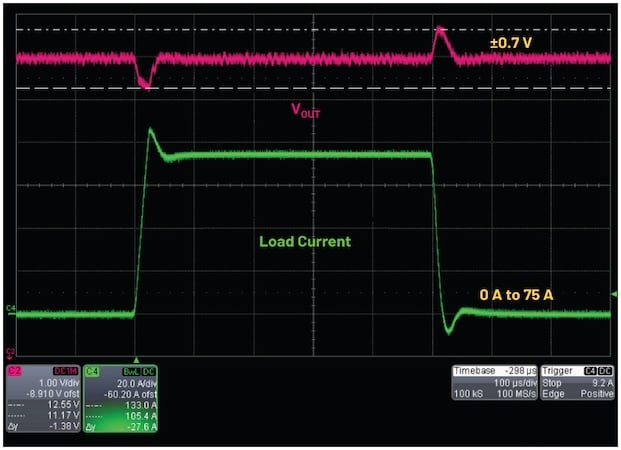
Figure 6. Transitoire à la sortie VO = 12 V (CL = 4× 1.1 μH) pour les variations de charge à 75 A. Image utilisée avec la permission de Bodo’s Power Systems []
Peut-être le paramètre de performance le plus important, l’efficacité atteinte, est illustré dans la Figure 7. Elle est comparée à la solution de pointe de l’industrie : 48 V à 12 V (réduction fixe 4:1) LLC avec transformateur matriciel et FETs GaN tant sur les côtés primaire que secondaire. Comparez l’efficacité à pleine charge atteinte de 97,6 % avec le benchmark de 96,3 %. Cela implique que 16,6 W de pertes en moins sont dissipées à pleine puissance, atteignant une amélioration de 1,6 fois dans la solution proposée. Une telle réduction des pertes est généralement très difficile à réaliser lorsque l’efficacité est déjà élevée.
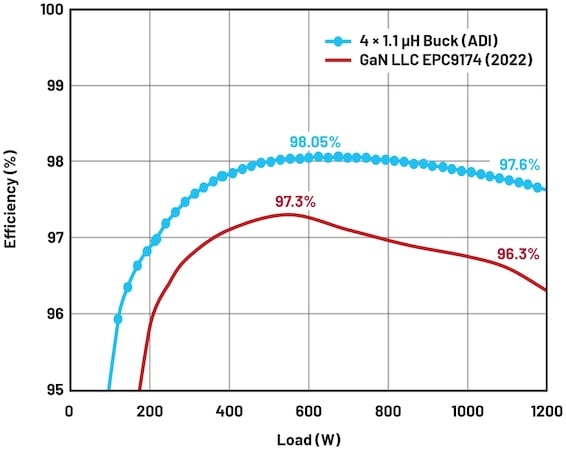
Figure 7. Comparaison d’efficacité des solutions de pointe de 48 V à 12 V dans le facteur de forme 1/8 de brique. Image utilisée avec la permission de Bodo’s Power Systems []
Un compromis entre taille et efficacité est certainement possible. La Figure 8 compare l’efficacité du CL = 4 × 1.1 μH (réduction de 4× de la taille des composants magnétiques par rapport à DL) à un CL plus grand = 4 × 3 μH avec seulement 2× de réduction du volume de l’inducteur. Le CL physiquement plus grand = 4 × 3 μH a une valeur plus élevée de Lk = 3 μH pour les fuites et une inductance mutuelle Lm = 10 μH plus importante. Cela permet une réduction confortable de Fs à 110 kHz, augmentant significativement l’efficacité dans toute la plage de charge.

Figure 8. Compromis efficacité vs. taille pour la solution proposée de 48 V à 12 V avec inducteurs couplés. Image utilisée avec la permission de Bodo’s Power Systems []
Conclusion
En utilisant les avantages de l’inducteur couplé, la solution de 48 V à 12 V réduit la taille totale des composants magnétiques de 4× par rapport aux inducteurs discrets de base, atteignant 1,2 kW dans le format standard de 1/8 de brique de l’industrie. Cette réduction de 4× de la taille des composants magnétiques est réalisée tout en préservant d’excellentes performances d’efficacité, augmentant le taux de montée de courant de l’inducteur de 6× en transitoire, et augmentant la cote Isat de l’inducteur de 2×.
Comparé à la solution de 48 V à 12 V de pointe de l’industrie dans le même facteur de forme, une réduction des pertes d’environ 1,6× est atteinte à pleine puissance. L’efficacité semble s’améliorer encore si une réduction plus faible de la taille magnétique est acceptable.
En même temps, la solution proposée est entièrement régulée et placée directement sur la carte mère du client. Elle utilise également des FETs en silicium standard pour optimiser encore le coût. Cela est comparé à un LLC non régulé 4:1, avec tous les GaNFETs fabriqués comme un module séparé avec un PCB spécialisé avec de nombreuses couches, une disposition sensible, et un transformateur matriciel intégré.
Le gain de performance global illustre les avantages de la technologie brevetée des inducteurs couplés d’ADI dans les applications de conversion DC-to-DC.
Cet article est paru à l’origine dans le magazine Bodo’s Power Systems [] et est coécrit par Alexandr Ikriannikov, Fellow, et Laszlo Lipcsei, directeur des applications produits, avec Analog Devices.