

Cet article explore la mise en œuvre du transfert d’énergie DC-DC isolé et bidirectionnel en adaptant un contrôleur numérique dédié pour fonctionner en transfert de puissance inverse, en plus de sa fonction standard de transfert de puissance en avant. La modélisation du système, la conception et la simulation des circuits, ainsi que les travaux expérimentaux sont présentés pour valider les concepts théoriques.
Cet article est publié par pÉlectrique dans le cadre d’un partenariat exclusif de contenu numérique avec Bodo’s Power Systems.
Les systèmes de stockage d’énergie modulaires à base de batteries sont des technologies clés pour la construction d’un écosystème énergétique vert, car ils permettent une utilisation efficace de l’électricité renouvelable. Une application de plus en plus populaire est celle des systèmes de stockage d’énergie de seconde vie pour les batteries. Dans ce sous-marché, jusqu’à 80 % des batteries mises au rebut devraient être réutilisées dans des systèmes de stockage d’énergie pour des services de réseau stationnaires, augmentant ainsi la durée de vie utile des batteries de cinq ans à 15 ans. On s’attend à ce que ces systèmes ajoutent jusqu’à 1 TWh à la capacité du réseau en 2030. Cette application émergente est appelée à prendre de l’importance sur le marché de l’énergie dans un avenir proche.
Une mise en œuvre typique consiste en différentes piles de modules de batterie transférant leur énergie vers les bus AC ou DC centralisés (pour une forme de distribution énergétique ultérieure vers diverses charges) via des convertisseurs de puissance. Le défi avec ce type de système est que chaque module a des compositions chimiques, des capacités et des profils de vieillissement différents. Dans une topologie modulaire traditionnelle, le module le plus faible affecte la capacité utilisable totale de l’ensemble de la pile (Figure 1).
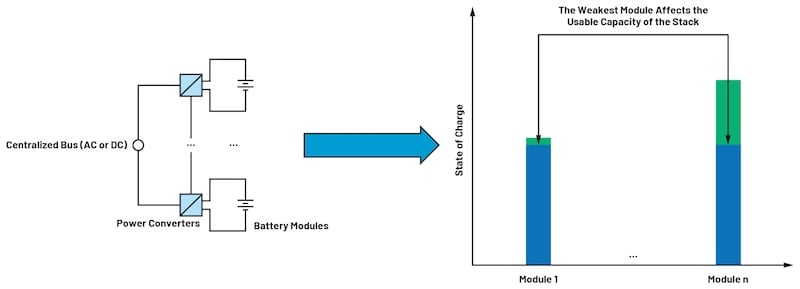
Figure 1. Le défi des systèmes de stockage d’énergie modulaires. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems [PDF]
Pour pallier cette limitation, dans l’architecture présentée à la Figure 2, l’énergie de la pile est transférée à un bus DC intermédiaire commun via des convertisseurs DC-DC individuels pour chaque module de batterie. Cette énergie est ensuite utilisée pour soutenir un bus AC ou DC de moyenne tension (MV) centralisé via un convertisseur de puissance principal. Les niveaux de tension et de puissance dans la Figure 2 ont été choisis sur la base des chiffres typiques des systèmes de stockage d’énergie sur le marché : modules de batterie de 48 V, bus DC intermédiaires de 400 V (DC), convertisseurs de puissance principaux de plus de 20 kW (haute puissance) et bus centralisés atteignant 1500 V.
Dans la Figure 2, étant donné que les références de terre de chaque module de la pile sont différentes, une isolation est nécessaire pour mettre en œuvre les convertisseurs DC-DC individuels de chaque module de batterie. De plus, pour soutenir les systèmes hybrides comme les systèmes de stockage d’énergie de seconde vie des batteries, chacun de ces convertisseurs doit également être capable de transférer de l’énergie bidirectionnelle. De cette manière, la charge/décharge indépendante de chaque module et l’équilibrage des charges peuvent être facilement réalisés. Par conséquent, les blocs centraux de l’application discutée ici sont des convertisseurs DC-DC isolés et bidirectionnels.
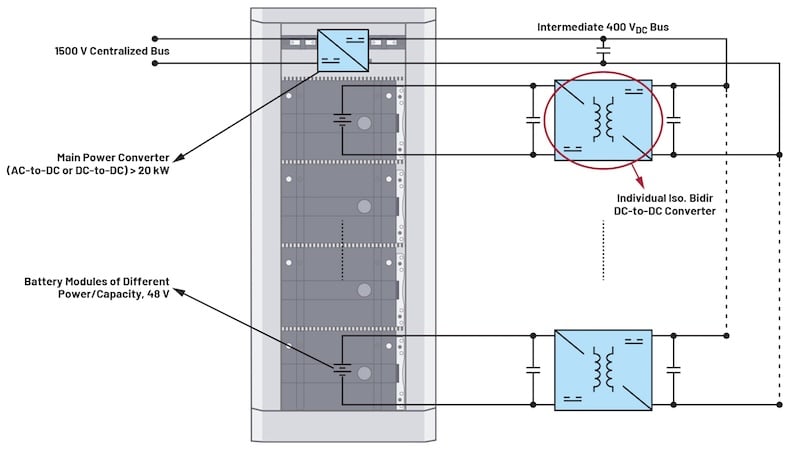
Figure 2. Un système de stockage d’énergie à base de batteries modulaire. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems [PDF]
Contrôleurs numériques dédiés pour les applications de conversion de puissance
Pour le contrôle des dispositifs de commutation dans les convertisseurs DC-DC haute puissance (supérieure à 1 kW), le contrôle numérique est la norme actuelle dans l’industrie et est généralement basé sur des unités microcontrôleurs (MCU). Malgré cela, une attention accrue à la sécurité fonctionnelle (FS) dans les applications industrielles pourrait favoriser l’utilisation de contrôleurs numériques dédiés à la place. Du point de vue de la conception du système, une certification FS plus facile est particulièrement bénéfique dans les implémentations modulaires car elle facilite le processus de conception et réduit donc le temps global jusqu’au revenu. Certaines des raisons qui favorisent les contrôleurs numériques dédiés par rapport aux MCU incluent :
- Les microcontrôleurs dépendent du logiciel, qui, jusqu’au développement de la norme IEC 61508, n’était pas autorisé dans un système de sécurité parce qu’il était considéré comme instable en raison du nombre d’états qu’il contenait. Par conséquent, une grande partie de l’effort FS avec un MCU est consacrée au processus utilisé pour développer le logiciel.
- Le MCU lui-même devrait être certifié en plus du logiciel. Bien que les contrôleurs numériques dédiés (en tant que dispositifs configurables) soient toujours axés sur les données, leur processus de configuration implique un langage à variabilité limitée (LVL) par opposition à un langage à variabilité complète (FVL), caractéristique des MCU.
- En tant que machine numérique séquentielle, les fonctions d’un contrôleur numérique dédié peuvent être complètement vérifiées par des tests, ce qui est généralement impossible pour le logiciel d’un MCU. En conséquence, les fonctions de sécurité de base sont intégrées par le dispositif lorsqu’on utilise un contrôleur dédié.
- Des fonctions de sécurité supplémentaires pour les implémentations MCU pourraient nécessiter un matériel considérable supplémentaire par rapport aux fonctions de sécurité intégrées dans un contrôleur dédié. Cela est susceptible d’ajouter plus de complexité au niveau du système lorsqu’on utilise l’analyse des modes de défaillance, des effets et des diagnostics (FMEDA).
- Lorsqu’on utilise un contrôleur dédié, une sécurité supplémentaire (si nécessaire) peut être programmée dans un MCU externe, généralement disponible au niveau du système.
L’ADP1055 d’Analog Devices est un contrôleur numérique spécialement conçu pour la conversion DC-DC haute puissance isolée et offre une gamme de fonctionnalités pour améliorer l’efficacité et la sécurité. Ces fonctions incluent la protection programmable contre les surintensités (OCP), la protection contre les surtensions (OVP), le verrouillage en cas de sous-tension (UVLO) et la protection contre les surtempératures (OTP). Comme de nombreuses pièces équivalentes disponibles sur le marché, ce contrôleur est conçu pour un transfert d’énergie dans une seule direction, c’est-à-dire le transféré de puissance en avant (FPT). Pour obtenir un fonctionnement bidirectionnel, l’application avec le contrôleur doit être adaptée pour fonctionner également en transfert de puissance inverse (RPT). La section suivante explore un aspect important dans les modes FPT et RPT, nécessaire à comprendre avant d’aborder le processus d’adaptation : l’efficacité du convertisseur DC-DC cible.
Réaliser une conversion d’énergie efficace
Parmi les différentes technologies disponibles pour le transfert de puissance isolé et bidirectionnel en DC, l’architecture présentée à la Figure 3a est l’une des plus utilisées commercialement en raison de sa simplicité d’implémentation.
Cette topologie peut être vue soit comme un pont complet alimenté en tension vers un redresseur synchrone à tap central en FPT, soit comme un convertisseur push-pull alimenté en courant vers un redresseur synchrone à pont complet en RPT. Une étude de cas avec 400 V (DC) au primaire (bus DC) et 48 V (DC) au secondaire (module de batterie) pour des niveaux de puissance élevés supérieurs à 1 kW est illustrée pour montrer les défis communs de l’application. LTspice a été utilisé pour simuler l’opération avec des dispositifs de puissance à large bande passante (WBG) typiques fonctionnant à une fréquence de commutation de 100 kHz. Les paramètres utilisés dans la simulation sont indiqués dans le Tableau 1.
Tableau 1. Paramètres de l’étude de simulation
| Paramètre du circuit | Valeur |
| Tension nominale du bus DC | VBUS = 400 V (DC) |
| Tension nominale de la batterie | VBATT = 48 V (DC) |
| Interrupteurs MA, MB, MC, MD | SCT3017AL 650 V/18 A MOSFETs SiC |
| Interrupteurs MSR1, MSR2, MCLAMP | IPB065N15N3 150 V/136 A MOSFETs |
| Transformateur | Np/Ns = 6:1; Lm = 50 µH; LLEAK =0.1 à 1 µH |
| Inductance de choc | Lo = 50 µH |
| Capaciteur de serrage | CCLAMP = 1 µF |
| Capaciteur du bus | Co = 10 µF |
| Fréquence de commutation | 100 kHz (effective 200 kHz) |
Les résultats de la Figure 3b montrent une baisse rapide de l’efficacité pour des niveaux de puissance élevés lorsqu’une modulation de largeur d’impulsion (PWM) à commutation dure (HS) régulière est utilisée. Cela s’accentue lors de la comparaison du RPT avec le FTP. Pour améliorer le fonctionnement, deux principaux mécanismes de perte sont identifiés, qui peuvent être atténués par les techniques de commutation correspondantes décrites ci-dessous.
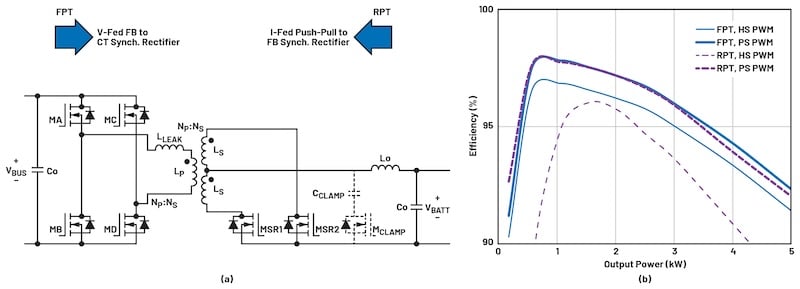
Figure 3. Simulation de la topologie de conversion de puissance : (a) modèle et (b) efficacités, en fonctionnement standard. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems [PDF]
Commutation douce
La Figure 4a montre comment, dans cette conception à faible inductance de fuite, les interrupteurs primaires MA et MB ne s’éteignent pas rapidement lors des transitions de commutation passif-à-actif lorsqu’une PWM régulière est utilisée. Cette situation crée des pertes de commutation plus élevées dans l’ensemble du système. Dans ce cas, l’utilisation d’une PWM décalée en phase (PS), comme la commutation à zéro tension (ZVS) ou la commutation douce, aide à réduire les tensions de drain-source à zéro pendant ces transitions. Cela peut être effectué en fournissant des temps morts appropriés dépendant de la charge, permettant la décharge complète des capacités de drain-à-source des interrupteurs. Les résultats de l’application de la PS sont montrés à la Figure 4b.
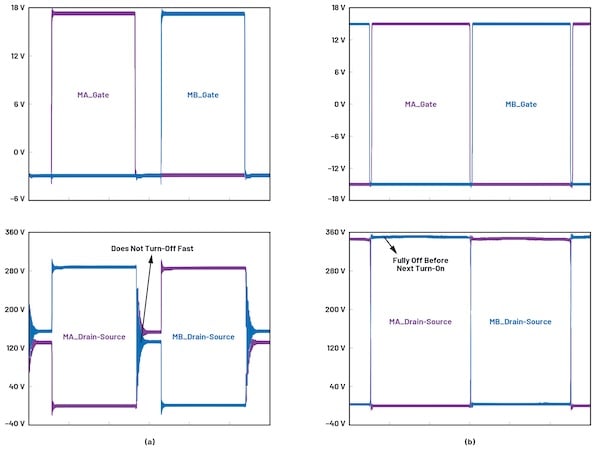
Figure 4. Transitions passif-à-actif des interrupteurs primaires avec (a) HS et (b) PS PWM. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems [PDF]
Serrage actif
La Figure 5a montre comment lors de la coupure des interrupteurs secondaires MR1 et MR2, un grand pic et une empiètement sont observés sur leurs tensions drain-à-source. Ces événements transitoires mettent en danger l’intégrité de l’interrupteur, gaspillent de l’énergie et contribuent aux interférences électromagnétiques. Le serrage actif contrôlé numériquement à l’aide d’un interrupteur supplémentaire (par exemple, avec MCLAMP dans la Figure 3) est la meilleure alternative pour atténuer les effets négatifs de ce pic. Cela peut encore améliorer l’efficacité de cette architecture. Les résultats de l’application d’une forme de serrage actif sont montrés à la Figure 5b.
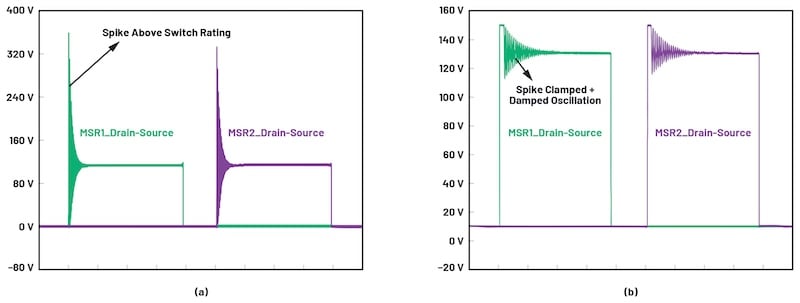
Figure 5. Transitions passif-à-actif des interrupteurs primaires avec (a) HS et (b) PS PWM. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems [PDF]
La mise en œuvre de ces stratégies a augmenté l’efficacité du convertisseur de moins de 80 % à plus de 90 % à 5 kW en RPT. Ces études de simulation prévoient également des efficacités similaires pour les modes FPT et RPT, comme montré à la Figure 3b.
Pour mettre en œuvre ces fonctions de commutation, l’ADP1055 offre six sorties PWM programmables pour former la synchronisation des interrupteurs et deux E/S GPIO configurables en tant qu’amortisseurs de serrage actif. Les deux fonctions sont facilement programmables dans une interface graphique conviviale. Les avantages de ces fonctions et d’autres de ce contrôleur numérique peuvent être étudiés plus en détail dans le guide de l’utilisateur ADP1055 EVALZ, où l’application FPT standard est considérée.
Une fois que les mécanismes pour atteindre des niveaux d’efficacité viables ont été identifiés, adaptés pour les modes FPT et RPT dans cette application, l’adaptation au RPT est finalement explorée.
Adaptation au transfert de puissance inverse
Pour démontrer le fonctionnement de l’application à l’étude en RPT, un ensemble expérimental à basse tension (LV) a été créé comme preuve de concept. Cette configuration était basée sur le matériel présent dans le guide de l’utilisateur ADP1055-EVALZ, initialement conçu pour 48 VDC à 12 VDC/240 W FPT, utilisant l’ADP1055 comme contrôleur principal avec une fréquence de commutation fSW = 125 kHz, comme cas standard. L’adaptation au mode de fonctionnement RPT a ensuite impliqué des modifications matérielles et logicielles adéquates. La Figure 6 (haut) montre la chaîne de signal proposée du côté matériel pour cette tâche, avec les points saillants suivants :
- Les quatre interrupteurs primaires sont allumés et éteints à l’aide de deux pilotes de porte demi-pont isolés ADuM3223 assortis. Les caractéristiques de synchronisation précises (54 ns max. de délai de propagation de l’isolant et du pilote) de ces pilotes reflètent avec précision les signaux de contrôle dans le PWM.
- L’unité d’alimentation isolée dans le guide de l’utilisateur ADP1055-EVALZ est recâblée et complétée par un régulateur LDO de précision auxiliaire (ADP1720) pour prendre en compte les deux références de terre dans le système et alimenter tous les circuits intégrés différents de l’application.
- Du côté de la mesure, les bornes pour la mesure du courant sur la résistance de shunt sont échangées de manière