

Cet article examine les principes de fonctionnement et les applications de trois types importants de moteurs triphasés : le moteur à induction à cage d’écureuil, le moteur à induction à rotor bobiné et le moteur synchrone.
Les moteurs triphasés, les plus largement utilisés dans l’industrie, jouent un rôle crucial dans divers secteurs. Il est donc important de reconnaître et de comprendre leurs principes de fonctionnement.
Les moteurs à induction à cage d’écureuil sont connus pour leur conception simple, qui crée un champ magnétique tournant à l’aide de bobinages statoriques. La vitesse synchrone, qui détermine les révolutions du moteur, dépend de la fréquence de l’alimentation et du nombre de pôles du stator. Les moteurs à induction à rotor bobiné permettent une variation de la vitesse via un rhéostat triphasé, mais ils sont devenus moins populaires en raison des problèmes de maintenance. Les moteurs synchrones, dotés d’un rotor alimenté en courant continu, maintiennent une vitesse constante sous différentes charges, sous réserve de respecter les procédures de démarrage appropriées.
Cet article va examiner en détail les moteurs à induction à cage d’écureuil, les moteurs à induction à rotor bobiné et les moteurs synchrones.

Image utilisée avec l’aimable autorisation de Adobe Stock
Moteurs à Induction à Cage d’Écureuil
Le moteur le plus largement utilisé dans l’industrie est le moteur à induction triphasé à cage d’écureuil. Le moteur à cage d’écureuil, illustré à la figure 1, possède deux parties : le rotor et le stator triphasé. Le terme armature désigne un composant rotatif constitué de bobinages et d’un collecteur, tandis que le terme rotor désigne le composant rotatif d’un moteur dépourvu de bobinages. Remarquez l’identification des fils du moteur étiquetés T1, T2 et T3. La conception simple est l’une des caractéristiques les plus attrayantes du moteur à cage d’écureuil.
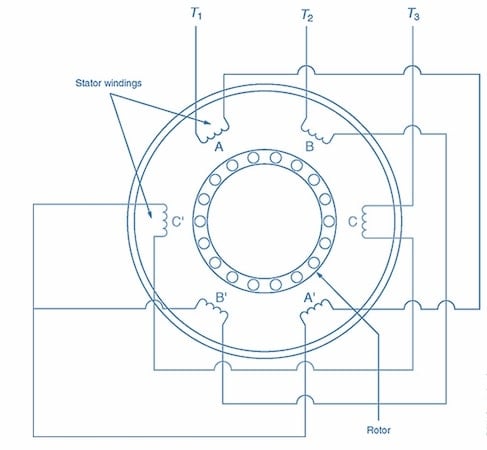
Figure 1. Le moteur à induction à cage d’écureuil. Image utilisée avec l’aimable autorisation d’Amna Ahmad
Le rotor du moteur à cage d’écureuil n’a pas de bobinages. Il est constitué de barres métalliques connectées à chaque extrémité à un anneau de court-circuit. Entre les barres métalliques se trouvent des feuilles de métal laminé. Pendant le fonctionnement du moteur, une tension est induite dans les barres métalliques, produisant un flux de courant et un champ magnétique. En fait, le moteur à cage d’écureuil tire son nom de ce rotor, qui ressemble à la roue d’exercice que l’on trouve couramment dans les cages de souris et de hamsters.
La figure 2 illustre la puissance CA triphasée appliquée aux bobinages du stator. La puissance triphasée produit une tension de crête tous les 120°.
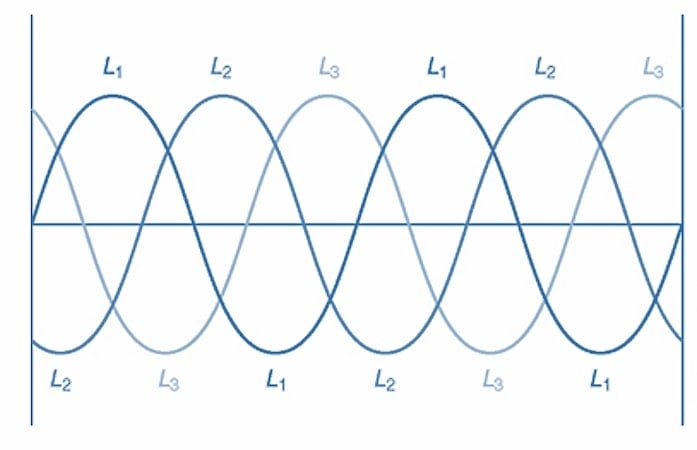
Figure 2. La forme d’onde triphasée. Image utilisée avec l’aimable autorisation d’Amna Ahmad
Maintenant, remarquez les trois bobinages séparés de phase dans le stator, illustrés à la figure 3. Les bobinages de phase sont disposés séquentiellement autour du boîtier du stator. Lorsque la puissance triphasée appliquée atteint son pic dans la direction positive dans la phase T1, les bobinages de phase T2 et T3 auront des polarités opposées, et leurs valeurs seront comprises entre 0 et leurs valeurs négatives maximales. Lorsque la phase T2 atteint son pic dans sa direction positive, T1 et T3 auront des polarités opposées, et leurs valeurs seront comprises entre 0 et leurs valeurs négatives maximales. Ce schéma se poursuit tout au long de la rotation complète de 360° de l’onde sinusoïdale CA appliquée.
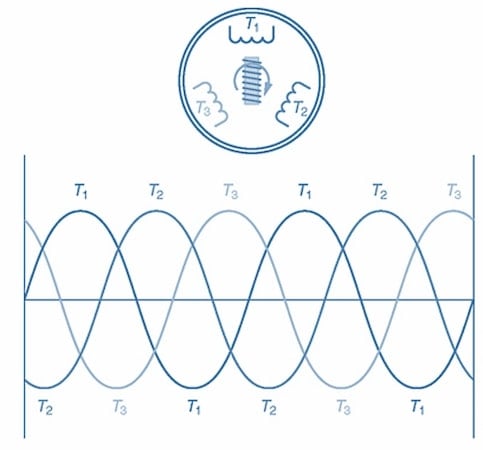
Figure 3. La rotation de phase produit un champ magnétique tournant dans le stator. Image utilisée avec l’aimable autorisation d’Amna Ahmad
Un champ magnétique tournant apparaît autour du stator. La vitesse à laquelle le champ magnétique tournant tourne est la vitesse synchrone. La vitesse synchrone est affectée par le nombre de pôles du stator et la fréquence de la CA appliquée. Cette relation est illustrée par la formule suivante :
\[S=\frac{120\times f}{P}\]
S = Vitesse synchrone en tr/min
F = Fréquence de la CA appliquée en hertz (Hz)
P = nombre de pôles du stator
Par exemple, quelle est la vitesse synchrone d’un moteur à cage d’écureuil à quatre pôles fonctionnant avec une alimentation CA de 60 Hz ?
Quels sont les valeurs connues ?
F = 60 Hz
P = 4
Quelle valeur est inconnue ?
S = ?
Quelle formule peut être utilisée ?
\[S=\frac{120\times f}{P}=\frac{120\times60}{4}=1800\,tr/min\]
Ainsi, la vitesse synchrone de ce moteur à cage d’écureuil est de 1800 tours par minute.
Le champ magnétique tournant du stator induit une tension dans les barres du rotor, provoquant un flux de courant. Le flux de courant dans les barres du rotor produit un autre champ magnétique qui est attiré par le champ magnétique tournant du stator, faisant tourner le rotor et produisant du couple. Cependant, le rotor ne tournera pas à la même vitesse que le champ tournant du stator. La friction dans les roulements et la résistance due au vent (ventilateur) feront tourner le rotor à une vitesse légèrement inférieure. Cela est connu sous le nom de glissement du rotor. Le glissement du rotor est la différence de vitesse entre la vitesse synchrone et la vitesse du rotor.
Jusqu’à récemment, le moteur à cage d’écureuil était considéré comme un moteur à vitesse fixe. Comme on peut le constater à partir de la formule ci-dessus pour la vitesse synchrone, la seule façon de faire varier la vitesse du moteur serait de changer la fréquence de la tension CA appliquée ou de changer le nombre de pôles du moteur. Les compagnies d’électricité aux États-Unis maintiennent avec précision la fréquence des lignes de puissance à 60 Hz. Par conséquent, changer la fréquence de l’alimentation CA appliquée n’était pas une option. Il est également impossible de changer le nombre de pôles du moteur. Le moteur devrait être totalement reconstruit. Aujourd’hui, cependant, avec les variateurs de vitesse électroniques, la fréquence de l’alimentation CA appliquée peut être modifiée, et par conséquent, la vitesse du moteur à cage d’écureuil aussi. En utilisant des composants à semi-conducteurs, les variateurs de vitesse électroniques accomplissent cela en convertissant l’alimentation CA appliquée en CC, en hachant le CC en impulsions dont la fréquence peut être variée, et en convertissant ces impulsions en une CA artificielle, qui est ensuite appliquée au moteur. Maintenant, la fréquence de l’alimentation CA appliquée peut être modifiée, permettant une opération à vitesse variable du moteur.
Pour inverser le sens de rotation d’un moteur à cage d’écureuil, il suffit d’intervertir les connexions de deux des trois fils du stator. En règle générale, T1 et T3 sont interchangés. Cela fera tourner le champ magnétique tournant du stator dans la direction opposée. Le rotor tournera alors dans la nouvelle direction du champ magnétique tournant, qui sera opposée à celle d’origine.
Applications des Moteurs à Induction à Cage d’Écureuil
Les moteurs à induction à cage d’écureuil sont largement utilisés dans de nombreuses industries en raison de leur construction robuste et de leur fiabilité. Une application importante est dans les machines industrielles, où ils alimentent des pompes, des compresseurs et des convoyeurs, fournissant le couple et la vitesse nécessaires pour un fonctionnement efficace. De plus, ces moteurs sont couramment intégrés dans les systèmes CVC pour les grands bâtiments commerciaux et les installations industrielles, assurant une ventilation et un contrôle climatique appropriés.
En outre, les moteurs à induction à cage d’écureuil peuvent être réutilisés comme générateurs en les connectant à une alimentation en réseau. Dans cette configuration, lorsque l’arbre du moteur est tourné manuellement ou par une force externe, il induit une force électromotrice (FEM) dans ses bobinages en raison du phénomène d’induction électromagnétique. Cette FEM crée une sortie en CA qui peut être alimentée dans le réseau, convertissant ainsi efficacement l’énergie mécanique en énergie électrique. Cette application est particulièrement utile pour l’alimentation de secours, dans des endroits isolés avec des connexions au réseau peu fiables, ou dans des situations d’urgence où un approvisionnement continu en électricité est crucial.
Moteurs à Induction à Rotor Bobiné
Une variation du moteur à cage d’écureuil est le moteur à induction à rotor bobiné. Ce moteur a été conçu pour répondre au besoin d’un moteur triphasé à vitesse variable. Cependant, à mesure que l’utilisation des variateurs de fréquence électroniques augmente, il devient moins courant.
Le moteur à induction à rotor bobiné est constitué d’un rotor contenant des bobinages, des bagues collectrices, des balais et d’un stator triphasé. La figure 4 montre les pièces d’un moteur à induction à rotor bobiné. Remarquez l’identification des fils du moteur étiquetés T1, T2 et T3 pour les connexions du stator et M1, M2, et M3 pour les connexions du rotor bobiné. La figure 4 montre également un rhéostat triphasé connecté à M1, M2, et M3 dans le circuit du rotor.
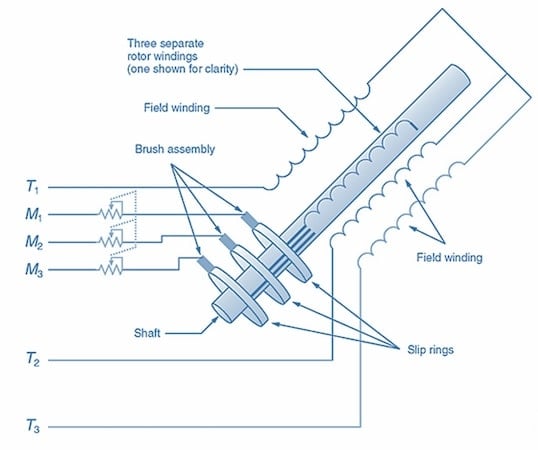
Figure 4. Pièces d’un moteur à induction à rotor bobiné. Seul un bobinage est montré sur l’arbre du rotor pour clarifier. Image utilisée avec l’aimable autorisation d’Amna Ahmad
La puissance triphasée est appliquée aux bobinages du stator. Un champ magnétique tournant est créé, induisant une tension dans les bobinages triphasés du rotor. Cette tension induite produit un courant, créant un champ magnétique dans les bobinages du rotor. Le champ magnétique du rotor interagit avec le champ magnétique tournant du stator, faisant tourner le rotor. En variant le rhéostat triphasé, la force du champ magnétique du rotor peut être modifiée. Si le champ magnétique est affaibli, la vitesse du rotor diminue. Lorsque le champ magnétique est renforcé, la vitesse du rotor augmente.
Ce contrôle du champ magnétique du rotor peut être utilisé pour faire varier la vitesse du moteur à induction à rotor bobiné lors de la conduite d’une charge constante. De plus, le champ magnétique du rotor peut être modifié par un processus automatisé en réponse à des conditions de charge variables. De cette manière, la vitesse du moteur à induction à rotor bobiné peut être maintenue assez constante.
Pour inverser le sens de rotation d’un moteur à induction à rotor bobiné, intervertissez simplement les connexions de deux des trois fils du stator. En règle générale, T1 et T3 sont interchangés. Cela fait tourner le champ magnétique tournant du stator dans la direction opposée. Le rotor tourne ensuite dans la nouvelle direction du champ magnétique tournant, qui est opposée à l’originale.
Le moteur à induction à rotor bobiné présente des inconvénients. Il est plus cher qu’un moteur à cage d’écureuil de taille similaire, nécessite plus de maintenance en raison de l’usure des balais et des bagues collectrices, et bien que fournissant une vitesse variable, cet avantage est devenu moins attrayant en raison de l’utilisation de variateurs de fréquence.
Applications des Moteurs à Induction à Rotor Bobiné
Les moteurs à induction à rotor bobiné offrent polyvalence et contrôlabilité, les rendant bien adaptés à des applications exigeantes. Une utilisation notable est dans les grues et palans trouvés dans les industries manufacturières et de la construction, où un contrôle précis de la vitesse et du couple est essentiel pour des opérations de levage sûres et efficaces. En outre, ces moteurs sont couramment employés dans les équipements miniers pour des tâches lourdes, telles que l’entraînement des convoyeurs à bande et l’alimentation des machines de forage. De plus, ils sont indispensables aux pompes et ventilateurs de grande taille nécessitant un contrôle de vitesse variable, garantissant des performances optimales et une efficacité énergétique dans les processus industriels.
Moteurs Synchrones
Les moteurs synchrones (illustrés à la figure 5) ont un stator triphasé, un rotor bobiné, des bagues collectrices et des balais. Cependant, le rotor a un seul bobinage comparé aux trois bobinages du moteur à induction à rotor bobiné. Le rotor contient également des barres de court-circuit similaires à celles du rotor du moteur à cage d’écureuil. Les fils du moteur synchrone sont étiquetés T1, T2, et T3 pour les connexions du stator et R1 et R2 pour les connexions du rotor. Une source de courant continu alimente le rotor.
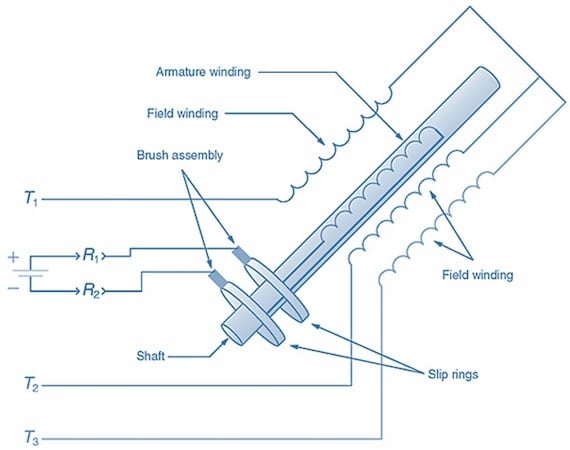
Figure 5. Pièces d’un moteur synchrone. Notez le courant continu appliqué au bobinage du rotor. Image utilisée avec l’aimable autorisation d’Amna Ahmad
Les moteurs synchrones sont démarrés en appliquant une puissance triphasée au stator. Cependant, l’alimentation n’est pas appliquée au rotor à ce moment. Lorsque la puissance triphasée est appliquée au stator, un champ magnétique tournant est créé. Le champ magnétique tournant induit une tension dans les barres de court-circuit du rotor. Cette tension induite produit un courant, créant un champ magnétique dans le rotor. Le rotor est alors attiré par le champ magnétique tournant du stator, faisant tourner le rotor.
Lorsque le rotor est à vitesse, la source de courant continu est activée, permettant d’appliquer du courant continu aux bobinages du rotor. Cela fait agir le rotor comme un électroaimant. Le rotor devient alors verrouillé en phase avec le champ magnétique tournant du stator. Cela permet au moteur synchrone de fonctionner à vitesse constante des conditions de charge nulle aux conditions de charge maximale. Une règle importante à retenir est qu’un moteur synchrone ne doit jamais être démarré avec le courant continu appliqué aux bobinages du rotor. Si un moteur synchrone est démarré de cette manière, le rotor ne tournera pas, endommageant le rotor et l’alimentation en courant continu.
Pour inverser la rotation d’un moteur synchrone, il suffit d’intervertir les connexions de deux des trois fils du stator. En règle générale, T1 et T3 sont interchangés, faisant tourner le champ magnétique tournant du stator dans la direction opposée. Le rotor tourne alors dans la nouvelle direction du champ magnétique tournant, qui est opposée à l’