

Les circuits de convertisseurs abaisseurs de tension DC-DC, à faible tension, monophasés, non isolés et à mode commuté ne fonctionnent pas toujours comme prévu. Cet article aide à résoudre neuf problèmes courants.
Cet article traite du dépannage d’un élément essentiel des systèmes électroniques qui ne fonctionnent pas toujours comme prévu : les circuits de convertisseurs abaisseurs de tension DC-DC, à faible tension, monophasés, non isolés et à mode commuté.
Règles générales pour le dépannage des convertisseurs
Lors du dépannage, il est important de prendre en compte les variables et de réduire les causes possibles de la panne.
Voici quelques lignes directrices :
- Pour dépanner le système, il faut le faire tomber en panne de manière fiable. Un problème qui disparaît de lui-même revient de lui-même.
- Ne changez qu’une seule chose à la fois et notez l’effet.
- Si le circuit cesse de fonctionner, demandez-vous : « Qu’est-ce qui a changé ? ». Y a-t-il eu un événement coïncidant avec la panne ?
- Vérifiez si la panne se déplace avec la carte du convertisseur, la puce ou la charge.
En gardant ces lignes directrices à l’esprit, voici neuf problèmes courants que vous pouvez rencontrer lors de la conception d’un convertisseur abaisseur DC-DC et quelques causes probables.
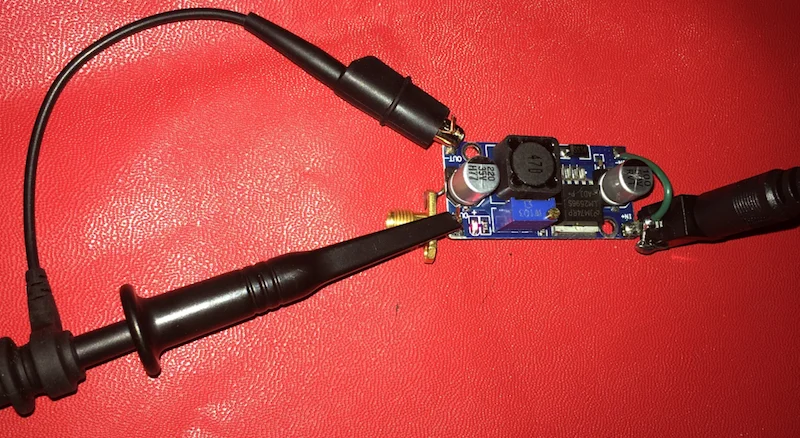
Une sonde 10× mesurant la tension de sortie. Image par Eric Bogatin
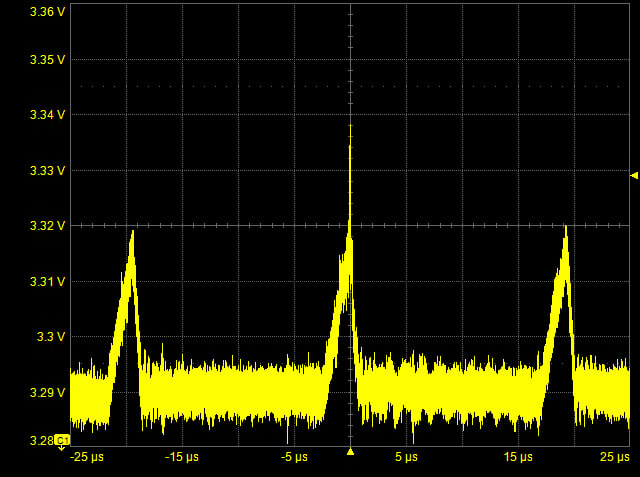
Problème n°1 : Trop d’ondulation
Si vous observez trop d’ondulation, l’inductance peut être trop faible : des valeurs plus élevées entraînent une ondulation plus faible mais une réponse transitoire plus lente.
De plus, gardez à l’esprit qu’un courant d’ondulation élevé dans l’inducteur signifie des courants de crête plus élevés et une plus grande probabilité de saturation de l’inducteur, surtout à haute température, ce qui impose également plus de stress sur vos MOSFETs.
D’autres problèmes pourraient être une valeur de Cout (capacité de sortie) trop faible (pas assez de stockage pour maintenir la sortie) ou une ESR (résistance série équivalente) de Cout trop élevée (causant une chute de tension IR dans Cout).
Enfin, une fréquence de commutation basse cause plus d’ondulation.
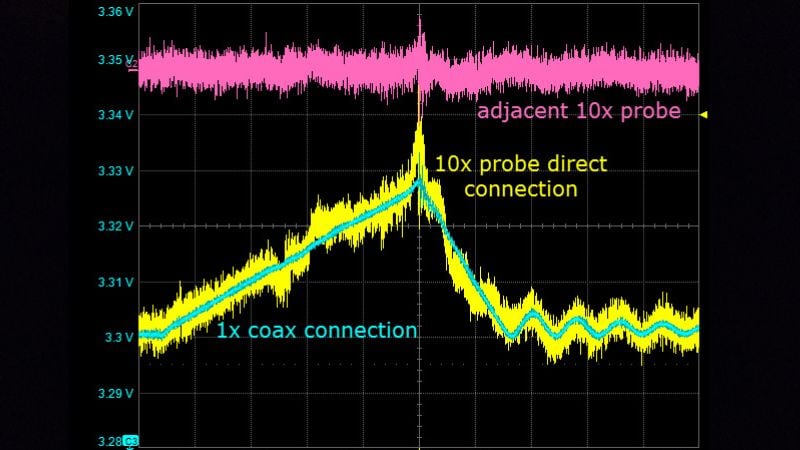
Bruit mesuré avec une sonde 10×. Capture d’écran par Eric Bogatin de l’article “Comment mesurer le bruit dans les alimentations à découpage (SMPS)”
Problème n°2 : Échec au démarrage
Demandez-vous d’abord : la broche d’activation est-elle correctement pilotée (ou tirée vers le haut) ? De même pour la sortie power good.
L’échec du démarrage peut survenir parce qu’une capacitance de charge excessive (comme pour un FPGA) agit comme un court-circuit et déclenche la limite de courant. Certains circuits intégrés ont des fonctionnalités de masquage et de démarrage progressif pour surmonter cela.
Pour éviter les fausses alertes, définissez le point de limite de courant aussi haut que possible et négociez avec l’ingénieur FPGA pour optimiser la capacitance au niveau du système.
Enfin, assurez-vous que la tension Vin ne chute pas et que le verrouillage sous tension (UV lockout) ne s’active pas à cause de la chute de tension d’entrée.
Problème n°3 : Tension présente à la sortie lorsqu’il est éteint
Si votre circuit est effectivement éteint mais que vous voyez une tension de sortie, elle provient généralement d’un autre circuit d’alimentation. Vérifiez les chemins non évidents vers d’autres rails actifs.
Problème n°4 : Mauvaise régulation
Avec une détection à distance de Vout, une mauvaise régulation peut être causée par une chute ohmique de tension dans le chemin d’alimentation, peut-être due à un rail (ligne de sortie d’un seul convertisseur) distribué à trop de charges sur une carte. C’est pourquoi parfois des circuits intégrés de convertisseurs multi-rails (« PMICs ») sont évités au profit de plusieurs convertisseurs près de leurs charges.
Si votre broche de détection de tension est bruyante, gardez la disposition de cette broche propre et assurez-vous que toutes les résistances associées au signal de détection sont placées près du contrôleur.
Une autre explication pourrait être que votre tension de référence soit instable ou mal filtrée.
Problème n°5 : Réponse transitoire lente
Le principal coupable ici peut être une trop grande capacitance de sortie ou un inducteur trop grand.
Un autre problème pourrait être une mauvaise compensation de boucle. Les caractéristiques de la boucle sont difficiles à caractériser complètement sans l’équipement adéquat. Mais même si vous n’avez pas d’analyseur de réseau, vous pouvez utiliser une charge de pas et observer l’ondulation transitoire – cela vous en dira beaucoup à moindre coût.
De plus, lors du développement, la compensation doit souvent changer si la charge du design change. Par exemple, utilisez-vous un module d’évaluation d’usine à la moitié de sa charge de conception ? Vous voyez le problème.
Problème n°6 : Instabilité
L’ESR de Cout peut être une cause d’instabilité car elle introduit un zéro dans la réponse de la boucle, ce qui fait que la courbe de gain cesse de descendre et commence à s’aligner, érodant ou éliminant les marges de gain. Si le zéro est suffisamment basse fréquence, le gain ne passera pas à zéro avant que la phase atteigne 180°.
Les circuits de convertisseurs moins chers peuvent être compensés en interne pour économiser des pièces externes, mais assurez-vous que votre Cout répond à la plage minimale et maximale de l’ESR de Cout dans laquelle ils seront stables.
D’autres explications de l’instabilité peuvent inclure une mauvaise détection de tension ou une disposition du nœud sommateur ou du bruit.
Assurez-vous de générer un diagramme de Bode avec le logiciel de conception et de vérifier les marges de phase et de gain, y compris sur la température.
Problème n°7 : Faible efficacité
Le condensateur de bootstrap doit être suffisamment grand pour fournir une charge à la grille du MOSFET de haut côté – sinon, ce MOSFET pourrait ne pas s’activer complètement et bruler de l’énergie. Une résistance en série avec la broche de boost peut être utilisée pour ajuster l’activation afin de contrôler l’ondulation.
Mesurer l’efficacité du circuit de puissance (surtout au-dessus de 90%) n’est pas trivial car cela nécessite des mesures de courant et est le rapport de deux quantités de puissance. Espérons que vous ayez caractérisé la contribution de chaque composant aux pertes via un outil de feuille de calcul, ce qui vous dira généralement que les MOSFETs et la résistance de l’inducteur (DCR ou résistance à courant continu) sont les principaux contributeurs à la chaleur perdue.

Une courbe montrant l’efficacité en fonction de la fréquence pour un régulateur à découpage abaisseur. Courbe tirée de la fiche technique du LT8610 de Linear Tech/Analog Devices.
Problème n°8 : Basse température
Rappelez-vous que l’ESR augmente pour les condensateurs électrolytiques à basse température, et la capacité diminue.
Problème n°9 : Problèmes de PMBus
Sur un bus de communication de données partagé, assurez-vous qu’un autre nœud ne bavarde pas de manière intermittente lorsque vous ne regardez pas.
De plus, assurez-vous que les résistances pull-up que vous avez utilisées sont suffisamment fortes : des résistances pull-up de 47 kΩ (comme dans un FPGA) ne valent pas du tout autant que des résistances de 10 kΩ.
Données, données, données
Si vous êtes complètement perdu quant à ce qu’il faut faire, obtenez plus de données – cela vous donnera quelque chose à analyser, à générer des idées et à encourager les discussions de groupe.