


Construire des systèmes rotatifs ou linéaires précis coûte souvent cher. Quand est-il justifié de dépenser plus pour concevoir et construire un tel système, et quels sont les différents composants et types de systèmes ?
Posons le décor : j’ai deux moteurs posés sur un banc devant moi.
Les deux moteurs sont de 1 ch. L’un me coûte 223,00 $, et l’autre 510,00 $. De même, l’un est contrôlé par un contacteur magnétique marche/arrêt à 42,00 $, tandis que l’autre nécessite un contrôleur numérique à 600,00 $. Un moteur me donne un mouvement rotatif lorsque je l’alimente, mais l’autre me donne un contrôle du mouvement.
Vous avez peut-être déjà deviné que le moteur de base marche/arrêt est moins cher. Si c’est le cas, vous avez raison !
Mais pourquoi devrais-je dépenser 4 à 6 fois plus d’argent pour un moteur qui me donne la même puissance rotative ?
Pourquoi se soucier du mouvement par rapport au contrôle du mouvement ?
Plutôt que de donner une réponse simpliste et générale à cette question, il est préférable de démontrer.
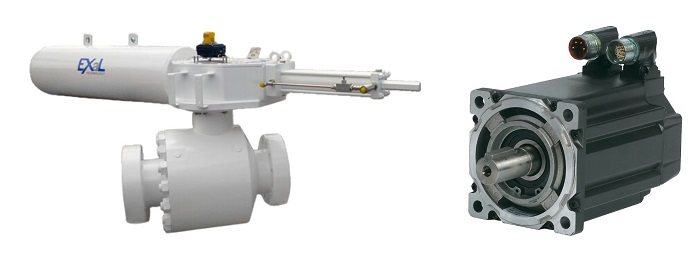
Figure 1. Le mouvement peut être sous forme hydraulique ou électrique, et il peut être rotatif ou linéaire.
Vous lisez probablement cet article sur un ordinateur, donc vous avez une souris à proximité. Essayez de pousser cette souris exactement de 2,354 pouces vers l’avant. Vous réalisez immédiatement que cette demande est ridicule. Simplement donner une légère poussée en espérant qu’elle atterrisse parfaitement à un endroit assigné est absurde. Vous auriez besoin de tellement d’éléments que votre main n’a pas : contrôle précis de la force, rétroaction, réglage, anticipation des taux de changement, connaissance du poids de la souris, friction de votre tapis de souris ou de votre table… Tous ces capteurs paraissent chers.
Je travaille dans l’industrie des scieries, où ma tâche consiste à programmer des équipements réalisant des tâches telles que le traitement des rondins, la découpe des planches, et l’empilage de paquets. Certains de ces systèmes doivent positionner une bille de 800 lb et deux systèmes de scies de 10 000 lb avec une précision allant jusqu’à 4/1000 de pouce.
Cela n’est possible qu’en utilisant ce que nous appelons le « contrôle du mouvement ».
Contrôle du mouvement : Composants matériels
Comme la plupart des professionnels de l’industrie le savent, un moteur électrique standard s’élance lorsqu’une tension est appliquée et s’arrête lorsqu’on la retire. Certains peuvent avoir des freins de différents types, mais le principe est généralement le même.

Figure 2. Exemples de divers systèmes de contrôle de moteurs servo.
Un système de contrôle du mouvement implique de nombreux éléments travaillant ensemble. Les composants de base d’un système de mouvement électrique incluent un moteur qui réalise le travail réel, un encodeur qui fournit une rétroaction (ce combo est généralement appelé un servo), un contrôleur de mouvement qui calcule les tensions requises pour déplacer le système correctement, et généralement un autre système de contrôle comme un PLC qui coordonne l’ensemble du système.
Les systèmes hydrauliques sont largement utilisés dans le contrôle du mouvement car ils peuvent fournir de grandes quantités d’énergie linéaire directe plutôt que l’énergie rotative d’un moteur servo. Un système hydraulique requiert également des composants importants : une unité de puissance hydraulique (généralement abrégée HPU) fournit le débit de fluide à une valve de contrôle proportionnelle qui peut contrôler rapidement et précisément le débit de fluide hydraulique, un transducteur linéaire qui donne une rétroaction linéaire du cylindre (actionneur) au lieu d’un encodeur qui fournit une rétroaction rotative, et, comme avant, le contrôleur pour calculer la position exacte et coordonner le système associé.
Affiner un système de contrôle du mouvement
Vous avez probablement entendu parler de “PID”. Cet acronyme signifie gain proportionnel, intégral et dérivé, les caractéristiques qui permettent au système de réagir correctement. Bien que la liste des paramètres individuels que nous utilisons dans le contrôle avancé du mouvement puisse dépasser 100 entrées, nous ne couvrons que la surface pour donner une perspective.
Le réglage PID change la façon dont un système réagit. Pensez à la quantité d’énergie nécessaire pour déplacer un poids de 2 onces sur une distance de 3 pouces. Maintenant, déplacez un poids de 2 livres sur 3 pouces. Enfin, déplacez le poids original de 2 onces sur 3 pieds. Chacun de ces mouvements nécessite des calculs totalement différents pour le mouvement.
Dans la section matériel ci-dessus, nous avons discuté de la nécessité d’un contrôleur de mouvement pour réaliser les mouvements. Ces contrôleurs ont la capacité d’effectuer des fonctions de calcul intégral beaucoup plus efficacement qu’un système de contrôle de base comme votre PLC standard. Cette mathématique avancée est utilisée pour calculer différents segments de mouvement que la machine nécessitera.
Ne vous inquiétez pas, nous n’allons pas faire de cours de mathématiques dans cet article, juste quelques discussions pour vous donner une perspective. L’accélération, la vitesse, la décélération, et le taux de changement de l’accélération ou de la décélération sont toutes des fonctions différentes et doivent être calculées. Le réglage PID donne au contrôleur des connaissances sur la manière dont il doit réagir à différents mouvements. Un gain proportionnel plus élevé (kP) fait réagir un système avec beaucoup plus de puissance plus rapidement. Peut-être que cela est nécessaire pour déplacer une charge lourde, mais pourrait causer des problèmes majeurs avec une charge légère. Le réglage est très important pour le fonctionnement global d’un système de mouvement.

Figure 3. Un système de contrôle du mouvement avec E/S configurables et contrôle de l’axe de sortie pour le mouvement électrique ou hydraulique. Image utilisée avec l’aimable autorisation de Delta Motion
Différents fabricants et programmation du mouvement
Bien que le contrôle du mouvement puisse être un domaine spécialisé, une large variété de fabricants sont prêts à répondre aux besoins de toute application. Delta Motion, Rockwell, Yaskawa, Mitsubishi, SureServo, et bien d’autres. Il est également très courant que différents fabricants mélangent et associent leurs composants. Ne soyez pas surpris si vous tombez sur un système utilisant, par exemple, un contrôleur de mouvement Delta Motion RMC, un PLC Rockwell, un transducteur linéaire Temposonic, un cylindre Cunningham et une valve Rexroth. J’ai vu d’innombrables systèmes mixtes fonctionner parfaitement, même dans des conditions extrêmes.
Comme il existe divers fabricants, vous trouverez également un logiciel de programmation (IDE) différent pour chacun. Programmer un système Rockwell sera complètement différent de programmer un système Mitsubishi. Certains fabricants produisent des contrôleurs de mouvement combinés qui peuvent également contrôler tout le système. Rockwell Automation a une gamme de PLCs comme celle-ci qui peuvent contrôler le système global et intégrer des axes de mouvement pour leurs systèmes Servo Kinetix.
Parfois, il peut être nécessaire de combiner plusieurs systèmes parce qu’un fabricant que vous utilisez déjà ne prend pas en charge le type de système de mouvement dont vous avez besoin. C’est le cas pour le partenaire de Rockwell, Delta Motion. Lorsque Rockwell a arrêté ses cartes de mouvement hydraulique, ils ont commencé à travailler plus étroitement avec Delta Motion pour permettre à Delta de fournir le mouvement hydraulique de manière compatible avec les PLC de Rockwell.
Avec les informations que vous avez maintenant, vous êtes prêt à commencer votre aventure dans le contrôle du mouvement. Nous savons que le mouvement est coûteux, complexe à construire et complexe à programmer. Indépendamment du coût et de la complexité, d’innombrables systèmes utilisent ces systèmes sous la pression extrême de l’industrie.
Du modèle économique jusqu’au Rolls Royce du matériel, cet article vous donnera l’expérience et les conseils dont vous avez besoin pour commencer à mettre en œuvre vos propres systèmes de contrôle du mouvement.