

Bien que la technologie des moteurs à courant continu (CC) ait une longue tradition, les stratégies utilisées pour les piloter varient de simples à complexes. Les conceptions doivent prendre en compte non seulement le moteur, mais aussi l’alimentation électrique et l’environnement.
Un contrôleur de moteur CC est un dispositif qui régule le fonctionnement d’un moteur à balais CC en contrôlant sa vitesse ou sa direction. Il fait l’interface entre le moteur et l’alimentation électrique en manipulant l’entrée électrique pour obtenir le comportement souhaité du moteur. Les pilotes pour moteurs sans balais (BLDC) et pas à pas sont totalement différents, le sujet d’aujourd’hui concerne donc les moteurs à balais CC.
Les contrôleurs de moteurs CC se déclinent en plusieurs types, avec deux catégories principales : le gradateur (SCR) et la modulation de largeur d’impulsion (PWM).

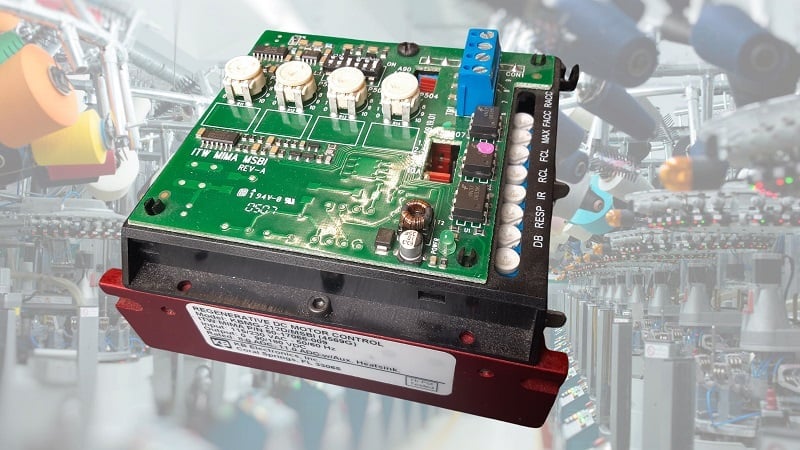
Figure 1. Un contrôleur de moteur CC avec une sortie PWM et un boîtier fermé NEMA. Image courtoisie de Automation Direct
Sorties SCR et PWM
Un SCR est un dispositif à semi-conducteurs composé de trois parties : une anode, une cathode et une gâchette. Il fonctionne comme une diode, permettant à l’électricité de circuler dans une seule direction (de l’anode à la cathode), mais uniquement lorsqu’une tension de déclenchement est appliquée à sa gâchette. Une fois déclenché, il reste en conduction même si le signal de la gâchette est retiré, jusqu’à ce que la tension positive à l’anode cesse. Lorsqu’il est utilisé pour convertir l’AC en CC, le SCR est activé pendant la partie positive du cycle. Puis, lorsque la tension atteint 0 à la fin du cycle positif, le SCR se désactive.
Le moment de l’impulsion de déclenchement détermine l’angle de déclenchement, soit le point exact dans l’onde sinusoïdale où le SCR s’active. Lorsqu’il est activé, l’électricité est transmise à l’enroulement du moteur. L’angle de déclenchement affecte également la tension moyenne et la vitesse de sortie. Si le déclenchement est précoce, l’électricité est transmise plus longtemps aux enroulements, et la tension moyenne est plus élevée.
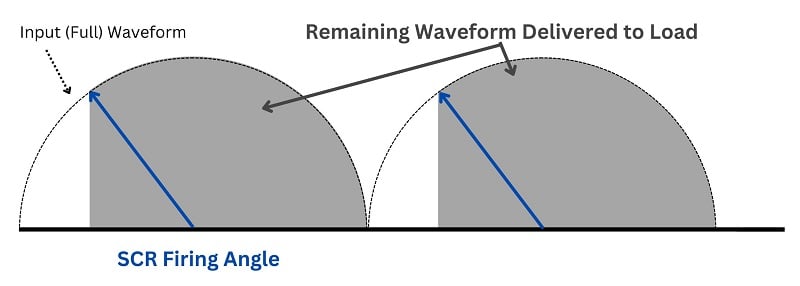
Figure 2. Cette image clarifie le concept d’« angle de déclenchement » dans les contrôles SCR. Image courtoisie de l’auteur
Dans les circuits PWM, un transistor ou un SCR contrôle la tension. Lorsque le transistor est activé, l’électricité circule à travers le moteur. Le moment où le transistor/SCR commence et s’arrête de conduire (appelé le cycle de service) détermine la tension moyenne transmise au moteur et la vitesse de son déplacement. Si on élargit l’impulsion, plus de tension est transmise au moteur en moyenne, le faisant se déplacer plus rapidement.
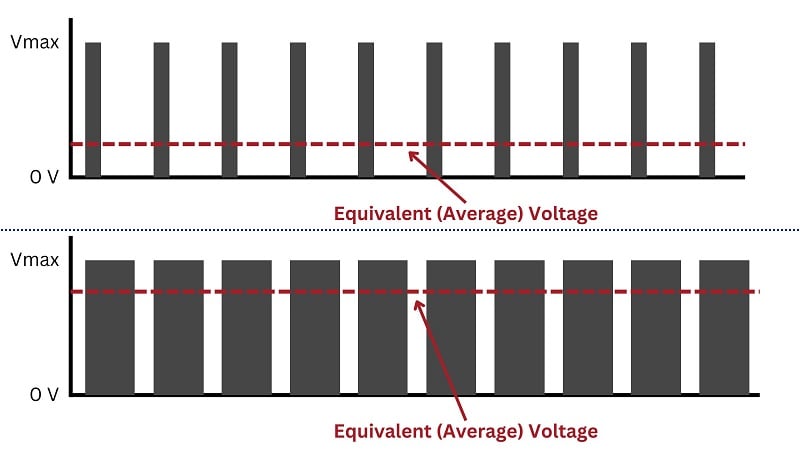
Figure 3. Cette image clarifie un circuit de contrôle PWM et montre comment la largeur de l’impulsion détermine la tension moyenne. Image courtoisie de l’auteur
Contrôles de vitesse pour moteurs CC
Contrôle SCR à demi-onde non filtrée
La méthode du contrôle SCR à demi-onde non filtrée est la méthode de contrôle de vitesse la plus simple avec le moins de dispositifs externes requis. La méthode demi-onde connecte un seul SCR en série avec l’enroulement de l’induit du moteur. Étant donné que le SCR est une diode, il supprime la partie négative de l’onde, et le moteur ne tournera que dans une seule direction. Cette méthode simple crée néanmoins un courant inégal, car l’onde AC monte de 0 V à la tension maximale (de ligne), puis redescend à 0 volts et reste à 0 V pendant que la moitié négative de l’onde passe.
Contrôle SCR à onde complète non filtrée
Le contrôle SCR à onde complète (également appelé pont) améliore le contrôle SCR à demi-onde en utilisant deux SCR et deux diodes pour non seulement laisser passer la moitié positive de l’onde AC, mais aussi inverser la moitié négative en une tension positive. Cette sortie se rapproche d’une onde CC, mais elle monte et descend encore de 0 volt à la tension maximale de la ligne, donc le courant est loin d’être stable. Avec une fréquence de ligne de 60 Hz, le moteur sera assez résilient à ces fluctuations rapides, donc cela est suffisant pour des entraînements de moteurs simples et à faible coût.
Contrôle SCR à onde complète filtrée
Le niveau de complexité suivant consiste à ajouter un condensateur de filtrage (généralement grand) à la sortie du redresseur. En stockant l’énergie pendant que l’onde sinusoïdale AC approche de la tension maximale de la ligne, il peut la libérer progressivement lorsque la tension faible est atteinte, lissant ainsi le profil accidenté causé par la montée et la descente de l’onde AC. Ce rectificateur en pont est courant dans presque toutes les alimentations, mais pour le contrôle des moteurs, le SCR est une distinction importante car il permet au moteur de recevoir de l’énergie uniquement lorsqu’il est dirigé par le contrôleur.
Modulation de largeur d’impulsion
Un contrôle de modulation de largeur d’impulsion filtré est la méthode la plus complexe. La tension est d’abord convertie de AC en CC avec un redresseur en pont, puis un SCR est déclenché rapidement en série avec les enroulements du moteur. Le moment des impulsions est contrôlé par un processeur externe au circuit d’alimentation. En variant le ratio entre le temps de marche et le temps d’arrêt, et en ajoutant au temps de réponse relativement lent du moteur, la sortie totale équivaut à une tension variable, mais lissée, en CC.
Pourquoi les entraînements de puissance élevée utilisent-ils des sorties SCR?
En raison de plusieurs facteurs clés, les SCR sont privilégiés dans les entraînements nécessitant une puissance plus élevée (HP). Premièrement, ils ont des cotes de courant et de tension impressionnantes, gérant des dizaines à des centaines d’ampères et plusieurs centaines à milliers de volts. Cette capacité les rend adaptés aux applications de haute puissance typiques des moteurs plus grands ou des machines industrielles. Les SCR présentent également une faible chute de tension directe lorsqu’ils conduisent, ce qui réduit les pertes de conduction. Cette efficacité est cruciale dans les configurations de haute puissance où réduire les pertes améliore l’efficacité globale.
Contrairement aux transistors, même populaires comme les transistors à effet de champ (FET), une fois déclenché, un SCR reste dans l’état ON jusqu’à ce que le courant tombe en dessous d’un certain seuil, assurant un fonctionnement fiable vital pour les systèmes où les temps d’arrêt sont coûteux. Le mécanisme de contrôle de la gâchette permet un déclenchement précis et rapide avec un faible courant de gâchette, idéal pour les applications nécessitant un contrôle précis. Combinant des cotes élevées, de faibles pertes, fiabilité, contrôle précis et commutation rapide, les SCR s’avèrent hautement adaptés aux entraînements de puissance plus élevée, mettant en avant la fiabilité, l’efficacité et la performance.
Enceintes pour contrôleurs de moteurs CC : ouvertes vs. fermées NEMA
Lors de la décision entre des enceintes de contrôleurs de moteurs ouverts et fermés NEMA, les facteurs liés à l’application et aux conditions d’exploitation déterminent votre choix.
Cadres ouverts
Choisissez des cadres ouverts lorsque votre moteur fonctionne dans un environnement propre et sec avec une exposition minimale aux contaminants, à l’humidité ou aux éléments agressifs.
Avantages des cadres ouverts :
- Rentabilité : Les cadres ouverts sont généralement moins chers que les cadres fermés NEMA en raison de leur construction plus simple.
- Ventilation adéquate : Les cadres ouverts offrent une ventilation suffisante pour maintenir la température du moteur dans des environnements où le refroidissement n’est pas une préoccupation majeure et le risque de contamination est faible.
- Considérations d’espace : La conception compacte des cadres ouverts en fait une option favorable si l’espace est limité.
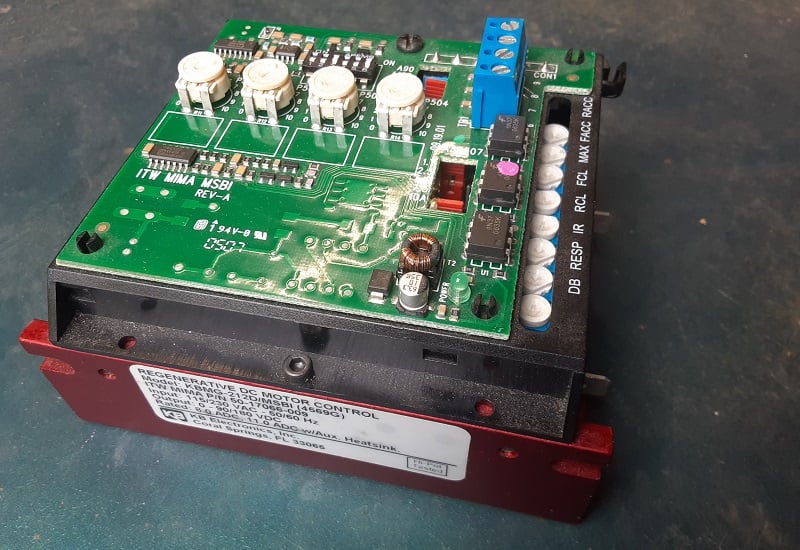
Figure 4. Ce contrôleur de moteur CC a un cadre ouvert. Image courtoisie de l’auteur
Cadres fermés NEMA
Sélectionnez des cadres fermés NEMA pour des applications où le moteur est exposé à l’humidité, aux contaminants, à l’humidité élevée ou à d’autres conditions difficiles qui pourraient compromettre ses performances et sa longévité.
Avantages des cadres fermés NEMA :
- Protection renforcée : Les cadres fermés NEMA offrent une protection supérieure contre l’humidité, la poussière et divers facteurs environnementaux, assurant une durée de vie prolongée du moteur et un fonctionnement fiable.
- Conformité de sécurité : Les cadres fermés NEMA sont requis dans les industries exigeant des moteurs fermés pour la protection du personnel et des équipements.
- Polyvalence : Les cadres fermés NEMA sont disponibles en divers types adaptés aux défis environnementaux spécifiques (par ex. TEFC, TENV, WPI, WPII). Ces cadres offrent une flexibilité pour adapter l’enceinte aux besoins de l’application.
Contrôleurs de moteurs CC réversibles vs. non réversibles
Les contrôleurs de moteurs CC réversibles sont largement utilisés dans divers secteurs industriels. Ils permettent un fonctionnement bidirectionnel essentiel pour la manutention des matériaux, les systèmes de convoyeurs, la robotique et l’assemblage automobile. Les fabricants proposent une gamme variée de ces contrôleurs pour répondre aux différents besoins de telles applications.
Cependant, il existe des scénarios où un contrôleur CC non réversible peut être préférable ou nécessaire. Lorsque le moteur fonctionne exclusivement dans une seule direction, comme dans les pompes ou les ventilateurs, un contrôleur non réversible simplifie le système de contrôle en éliminant la nécessité de la fonctionnalité réversible. Les économies de coûts motivent également la préférence pour les contrôleurs non réversibles dans les applications où le fonctionnement bidirectionnel n’est pas requis.
Résumé rapide : Différences entre entrées AC et CC
Lorsqu’un contrôleur de moteur CC est utilisé avec une entrée de tension AC, il intègre un circuit redresseur qui transforme le courant alternatif (AC) en courant continu (CC), nécessaire au fonctionnement des moteurs CC. Ce redresseur utilise généralement des diodes ou des thyristors pour faire circuler le courant dans une seule direction. En revanche, si l’entrée est de la tension CC, le contrôleur peut utiliser directement cette tension pour faire fonctionner le moteur. Parfois, des composants supplémentaires peuvent être nécessaires pour ajuster ou stabiliser la tension CC en fonction des besoins spécifiques du moteur. Cette polyvalence permet au contrôleur d’être utilisé efficacement dans divers environnements, que ce soit avec une source d’alimentation AC ou CC.
Les tensions d’entrée standard pour les contrôleurs de moteurs CC varient largement pour s’adapter à différents usages et configurations. Pour les entrées AC, les tensions typiques incluent 12 VAC, 24 VAC, 120 VAC et 240 VAC, couvrant une gamme allant des petits dispositifs de faible puissance aux machines plus substantielles utilisées en milieu industriel. Du côté des entrées CC, les tensions d’entrée standard varient généralement de 12 à 48 VCC. Cette variété assure des options disponibles pour tout, depuis les projets de base jusqu’aux systèmes d’automatisation complexes.