


Cet article examine le rôle du matériel de contrôle en boucle, ou signal-HIL, dans la conception, les tests et la fabrication des véhicules électriques.
Ce article est publié par pÉlectrique dans le cadre d’un partenariat exclusif de contenu numérique avec Bodo’s Power Systems.
L’électrification des transports transforme la manière dont les véhicules sont conçus, testés et fabriqués. Le matériel de contrôle en boucle (C-HIL), également connu sous le nom de signal-HIL, est devenu une méthodologie alternative pour tester le firmware de contrôle des électroniques de puissance, offrant facilité d’utilisation, large couverture des tests grâce à l’automatisation, ainsi qu’un coût relativement bas par rapport aux méthodologies de test qui incluent le flux de puissance, comme les configurations power-HIL.
Alors que l’adoption des véhicules électriques s’accélère, les chargeurs à la fois stationnaires et embarqués (OBC) attirent une attention croissante dans l’industrie, présentant des défis critiques pour l’avenir de la mobilité électrique. Pour soutenir le développement et le test des contrôles avancés des chargeurs de VE utilisant C-HIL, les convertisseurs de puissance à haute fréquence de commutation typiques de ces applications doivent être simulés en temps réel avec une grande fidélité. Cet article fournit un aperçu des défis et des solutions clés qui rendent cela possible de manière précise, sécurisée et rentable.

Image utilisée avec l’aimable autorisation de Bodo’s Power Systems []
Simulation en Temps Réel des Électroniques de Puissance
La simulation des circuits électroniques de puissance en temps réel est généralement exécutée sur des simulateurs basés sur FPGA. Lors de la conception de telles plateformes basées sur FPGA, trois aspects clés doivent être pris en compte :
- Complexité du modèle de commutateur : Le modèle de commutateur à semi-conducteurs peut être simulé avec divers niveaux de fidélité, allant de modèles transitoires très détaillés utilisés pour la conception du matériel à des modèles idéaux ou mêmes des modèles de convertisseur moyens qui remplacent les commutateurs par des sources équivalentes.
- Pas de temps réalisable : En fonction de la complexité du modèle de commutateur, différents pas de temps sont nécessaires pour simuler correctement toutes les dynamiques d’intérêt. Les simulations très détaillées des effets parasitaires dans les modèles transitoires peuvent nécessiter une résolution en picosecondes, tandis que les modèles de convertisseurs moyens pourraient être simulés avec un pas de simulation par période de commutation.
- Facilité d’utilisation : La performance maximale peut être atteinte en codant manuellement et en optimisant les équations pour le convertisseur souhaité en VHDL. Cependant, modifier un tel modèle optimisé serait très chronophage et délicat. En revanche, une approche de simulation plus généralisée pourrait manquer de l’optimisation nécessaire pour atteindre les courtes étapes de temps requises.
Le principal défi dans le développement d’une plateforme de simulateur HIL efficace est d’équilibrer ces trois exigences. La plateforme Typhoon HIL est spécialement conçue pour les applications d’électronique de puissance grâce aux choix de conception suivants :
- Éditeur de schémas graphiques : Un éditeur de schémas graphiques est utilisé pour concevoir le circuit. Au lieu de générer du code VHDL, ainsi que la synthèse, la génération de flux binaire, etc., un solveur FPGA configurable est utilisé. Le modèle est chargé dans le solveur via un processus de compilation à un clic, prenant généralement moins d’une minute.
- Modèle de commutateur idéal : Contrairement aux modèles de commutateur très détaillés, un modèle de commutateur idéal ne nécessite pas de pas de temps sub-nanosecondes pour simuler la commutation des commutateurs. Cependant, il est toujours capable de simuler les convertisseurs d’électroniques de puissance avec une grande fidélité pour la conception et le test des contrôles. Différents ensembles de matrices d’état-espace sont utilisés pour simuler les circuits correspondant à différentes combinaisons d’états de commutateurs. Cela signifie qu’un événement de commutation peut être simulé par deux étapes de temps consécutives avec deux ensembles de matrices différents. Le modèle de commutateur idéal peut facilement être amélioré en ajoutant une chute de tension directe.
- Surtension GDS : Les signaux de pilotage des portes (GDS) aux entrées numériques des simulateurs HIL sont échantillonnés plus rapidement que le pas de temps de simulation. Puisque l’horloge du contrôleur n’est pas synchronisée avec le simulateur, le front du signal de commande intervient dans la durée du pas de temps de simulation. Ce front (l’événement de commutation) est horodaté, et l’information est utilisée pour compenser les résultats de simulation dans les pas de temps suivants, augmentant ainsi la résolution de la détection des événements de commutation.
Les simulateurs Typhoon HIL ont été appliqués avec succès dans diverses applications d’électroniques de puissance pendant plus d’une décennie, la dernière génération étant capable de simuler des circuits avec des pas de temps aussi bas que 200 ns et une résolution d’échantillonnage DI de 3,5 ns.
Simulation de Convertisseur DC-DC
Un chargeur de VE typique comprend une étape de correction du facteur de puissance (PFC) d’entrée et une étape isolée de convertisseur DC-DC, cette dernière étant généralement construite en utilisant des topologies de pont actif double (DAB) ou résonantes (LLC, CLLLC). La simulation en temps réel de ces topologies DC-DC est particulièrement exigeante en raison de :
- Fréquences de commutation élevées : Celles-ci sont généralement utilisées pour réduire la taille et le poids des transformateurs à haute fréquence, ce qui est particulièrement important dans les applications OBC en raison des contraintes de volume et de poids. Aujourd’hui, des fréquences de commutation dépassant 100 kHz sont courantes, généralement atteintes grâce aux semi-conducteurs à large bande interdit.
- Transfert de puissance à la fréquence de commutation : Dans les convertisseurs connectés au réseau et les applications de conduite électrique, le transfert principal de puissance se produit à une fréquence d’au moins un ordre de magnitude inférieure à la fréquence de commutation. Dans le cas des convertisseurs avec un transformateur haute fréquence, tels que les convertisseurs DAB et LLC, le transfert de puissance se fait à la fréquence de commutation. Cela signifie qu’une petite perte de résolution temporelle affectera directement le transfert de puissance, impactant ainsi la fidélité du modèle et, par conséquent, le fonctionnement du contrôleur.
Il est intéressant de noter que la principale source de perte de résolution temporelle pour les topologies DAB et LLC n’est ni le pas de temps de simulation ni la résolution d’échantillonnage des entrées numériques. Au contraire, elle provient de la détection du passage par zéro du courant de diode, car ce type d’événement de commutation est généralement détecté avec la résolution du pas de temps dans les applications en temps réel. Cela est illustré par l’exécution d’un modèle de convertisseur DAB commutant à 100 kHz avec un temps mort de 2%, le pas de temps de simulation étant intentionnellement fixé à un long 500 ns. Comme le montre la figure 1, les résultats de simulation sont bien alignés avec la courbe de transfert de puissance de référence à la plupart des points de fonctionnement. Cependant, à certains points, il y a des écarts significatifs par rapport à la référence. Ce sont les points de fonctionnement où le courant de l’enroulement croise zéro pendant le temps mort.
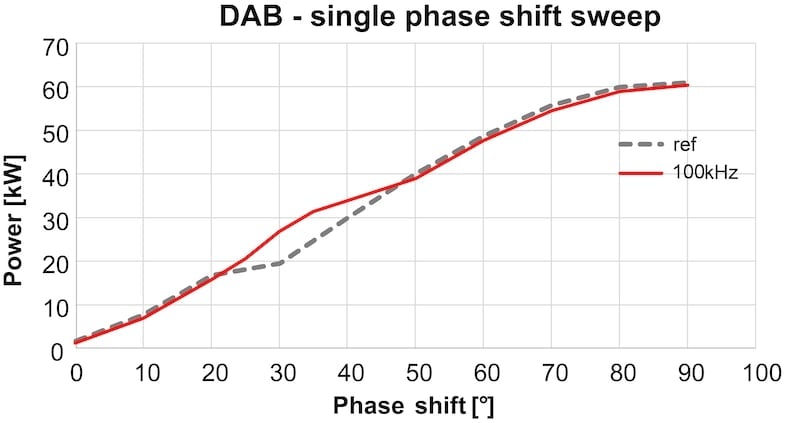
Figure 1. Simulation DAB – fréquence de commutation de 100 kHz, pas de temps de 500 ns. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems []
À travers des enquêtes collaboratives avec des partenaires industriels, Typhoon HIL a conclu que les modèles DAB et LLC fonctionnant avec des pas de temps aussi bas que 200 ns ne fournissent toujours pas la fidélité suffisante pour les tests HIL. Pour améliorer la détection du passage par zéro du courant de diode dans ces modèles, un solveur spécialisé a été développé.
Solveur de Convertisseur DC-DC
Le solveur de convertisseur DC-DC est un module FPGA optimisé capable de simuler la famille de convertisseurs DAB et LLC à un pas de temps de 25 ns. Cela permet une simulation multi-taux avec deux taux de simulation :
- Pas de temps de simulation utilisé par un solveur FPGA configurable, avec des pas de temps allant jusqu’à 200 ns.
- Pas de solveur utilisé par le solveur spécialisé de convertisseur DC-DC, qui simule les modèles DAB ou LLC à 25 ns.
Ces deux parties du modèle échangent les tensions et courants CC. Du point de vue de l’utilisateur, le solveur est déployé en tant que composant unique – Convertisseur DAB ou résonant, qui peut être adapté pour différentes variantes de topologie, comme CLLLC. Cela assure une facilité d’utilisation tout en améliorant significativement la fidélité de la simulation (Figure 2).
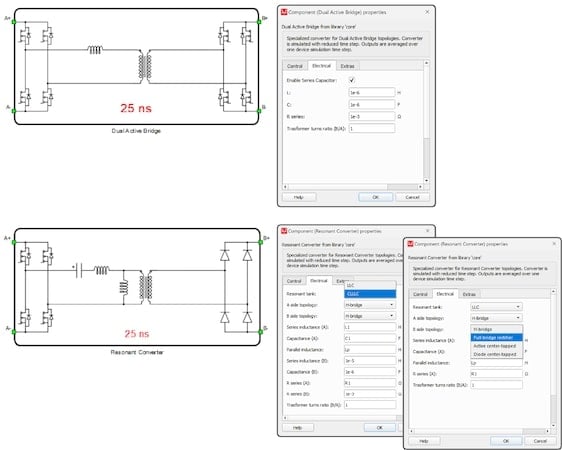
Figure 2. Composants du Pont Actif Double et du Convertisseur Résonant dans l’Éditeur Schématique. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems []
Pour tester les performances de ce solveur spécialisé, un montage expérimental a été créé en utilisant un contrôleur externe afin de reproduire un scénario réaliste où l’horloge du contrôleur n’est pas synchronisée avec la base temporelle du simulateur. Le test a d’abord été effectué sur un modèle de convertisseur DAB, avec les résultats montrés à la Figure 2. Le transfert de puissance a été observé comme sortant. Diverses stratégies de modulation ont été mises en œuvre pour couvrir différents points de fonctionnement sur l’ensemble de la plage opérationnelle, y compris les points de fonctionnement avec des événements de passage par zéro du courant de diode. Des données plus détaillées peuvent être trouvées dans le document technique publié par Typhoon HIL. Les résultats indiquent que la simulation fonctionne bien pour des fréquences de commutation allant jusqu’à 300 kHz.
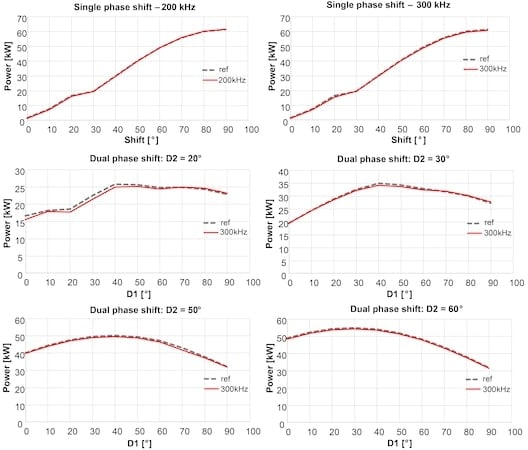
Figure 3. Résultats de simulation du Pont Actif Double. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems []
Ensuite, plusieurs conceptions de convertisseurs résonants LLC ont été testées, en considérant une fréquence résonante en série fr = 250 kHz. La fréquence de commutation a été variée de 0,5 fr, jusqu’à 2 fr et le rapport tension de sortie/tension d’entrée a été utilisé comme référence. Le rapport d’inductance parallèle-à-série a été maintenu constant (k = Lp ⁄ Ls = 8). En même temps, l’impédance caractéristique (Zc= √(Ls ⁄ C) a été variée, entraînant des valeurs de facteur Q et des caractéristiques de tension différentes, comme montré à la Figure 4. Les données de simulation montrent que la simulation fonctionne bien sur toute la plage de fréquences de commutation, jusqu’à 500 kHz.
En plus de hautes performances, l’utilisation des ressources a également été considérée lors de la conception du solveur de convertisseur DC-DC. En conséquence, jusqu’à 8 convertisseurs peuvent être simulés sur un seul appareil HIL606.
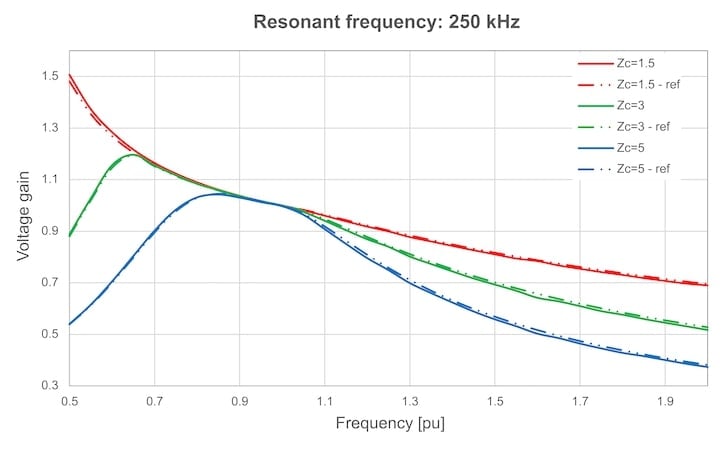
Figure 4. Courbes de gain de tension du convertisseur LLC. Image utilisée avec l’aimable autorisation de Bodo’s Power Systems []
Conclusions
La simulation précise en temps réel des topologies DAB et résonantes à commutation rapide s’est avérée être une tâche difficile en pratique. L’approche de solveur optimisé présentée par Typhoon HIL répond à ces défis en fournissant une fidélité de simulation élevée dans un large éventail d’applications typiques tout en maintenant la facilité d’utilisation que l’on trouve généralement dans les plateformes de simulation hors ligne. Les modèles basés sur le solveur DC-DC ont été utilisés avec succès pour le développement et le test des contrôles dans des applications de charge avancées depuis 2022. En plus des résultats fournis dans cet article, d’autres données peuvent être fournies sur demande, y compris des benchmarks basés sur un ensemble de paramètres spécifiés.
Ce article est paru à l’origine dans Bodo’s Power Systems [] magazine et est co-écrit par Jovan Zelic, Ingénieur Modélisation Senior, Dusan Majstorovic, Directeur de la Technologie, et Caio Osorio, Ingénieur en Applications & Responsable Mondial des Programmes Académiques, avec Typhoon HIL.